in Japanese
Introduction
In
the previous page, a scene recognition (15-class classification) was performed by using Chainer. In this page,
a Fully Convolutional Network (FCN) is simplified and implemented by means of Chainer.
Computation Environment
The same instance as the previous page, g2.2xlarge in the Amazon EC2, is used.
Dataset
In this work an FCN is trained on a dataset
VOC2012 which includes ground truth segmentations. The examples are given below:
The number of images is 2913. I divided them by the split ratio 4:1. The former set of images corresponds to a training dataset, and the latter a testing one.
| number of train |
number of test |
| 2330 |
580 |
The number of the training (testing) images is rounded off to make it a multiple of 10 (5). 10 (5) is a mini batch size for the training (testing) images. Though
the original FCN operates on an input of any size, for simplicity the FCN in this work takes a fixed-sized (224$\times$224) input. Therefore all images are resized in advance as shown below:
I cropped a maximum square centered on an image and resized it to 224$\times$224.
VOC2012 provides 21 classes as specified below:
| label |
category |
| 0 |
background |
1 |
aeroplane |
2 |
bicycle |
3 |
bird |
4 |
boat |
5 |
bottle |
6 |
bus |
7 |
car |
8 |
cat |
9 |
chair |
10 |
cow |
11 |
diningtable |
12 |
dog |
13 |
horse |
14 |
motorbike |
15 |
person |
16 |
potted plant |
17 |
sheep |
18 |
sofa |
19 |
train |
20 |
tv/monitor |
Network Structure
The detailed structure of a network used in this work is as follows:
In
the original FCN, there are also some layers that follow the layer
pool5. For simplicity, these layers are removed in this work.
- name: a layer name
- input: a size of an input feature map
- in_channels: the number of input feature maps
- out_channels: the number of output feature maps
- ksize: a kernel size
- stride: a stride size
- pad: a padding size
- output: a size of an output feature map
pool3,
pool4, and
pool5 are followed by
score-pool3,
score-pool4, and
score-pool5, respectively. Their parameters are shown below:
I call their (
score-pool3,
score-pool4, and
score-pool5) outputs
p3,
p4, and
p5.
The layers,
upsampled_pool4 and
upsampled_pool5 shown in the table above, are applied to
p4 and
p5, respectively. After summing their (
upsample_pool4 and
upsample_pool5) outputs and
p3, the sum is upsampled back to the original image size through the layer
upsample_final shown in the table. This net structure corresponds to the FCN-8s described in
the original FCN.
Implementation of Network
The network can be written in Chainer like this:
-- myfcn.py --
I assigned pixels on the borderline between objects and a background with a label of -1. To do so leads to no contribution from those pixels when calculating
softmax_cross_entropy (see
the Chainer's specification for details). The function
calculate_accuracy also throws away contribution from the pixels on the borderline. The function
add is defined as:
-- add.py --
Training
The script to train is as follows:
-- train.py --
-- mini_batch_loader.py --
I used
copy_model described in
the page. The file
VGGNet.py was downloaded from
the page. The procedures expressed in the script
train.py are as follows:
- make an instance of the type
MiniBatchLoader
- make an instance of the type
VGGNet
- make an instance of the type
MyFcn
- copy parameters of the
VGGNet instance to those of MyFcn one
- select MomentumSGD as an optimization algorithm
- run a loop to train the net
To load all the training data on the GPU memory at a time causes the error "cudaErrorMemoryAllocation: out of memory" to occur. Therefore, only the minibatch-size data is loaded every time the training procedure requires it.
Results
Iterations are terminated at the 62nd epoch. The accuracies and the losses for the training and testing datasets are shown below.
-- Training Dataset --
-- Testing Dataset --
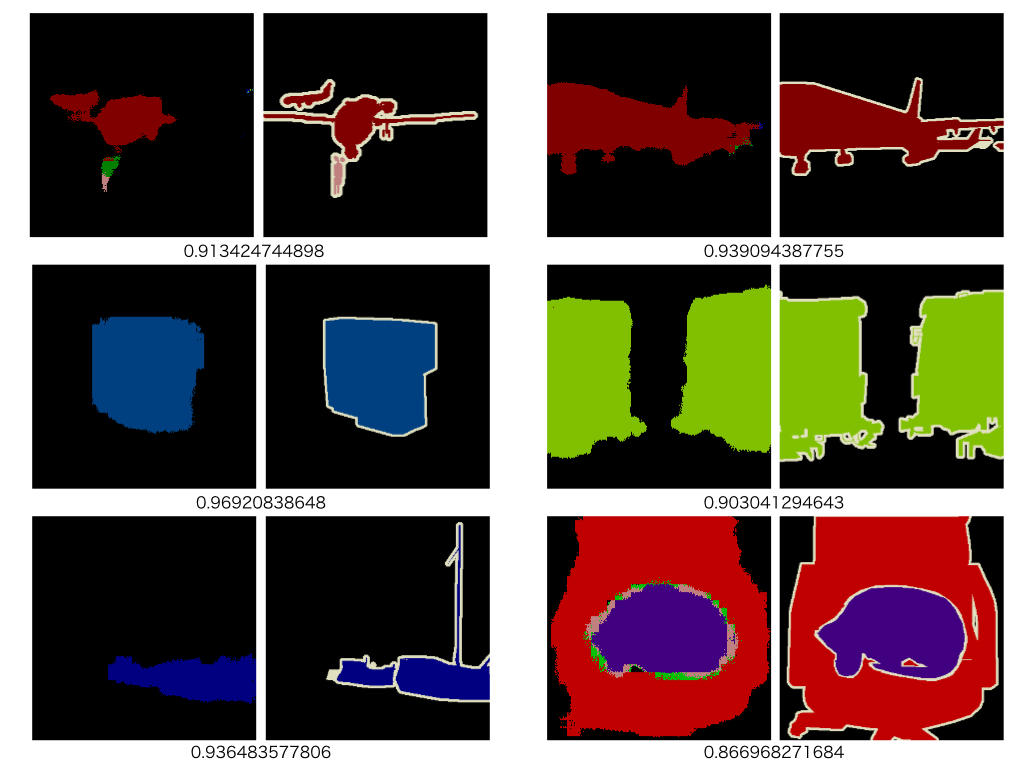
The accuracy is defined as the average percentage of those pixels per image, which have labels classified correctly, over the training or the testing dataset. The behavior of the accuracy and the loss for the training dataset is what we would expect it to be, while for the testing dataset the loss curve surges at some point. It seems to indicate overfitting. The final accuracies are 99% for the training dataset and 82% for the testing dataset. A sample set of an input image, a predicted segmentation, and a ground truth is shown with the accuracy below:
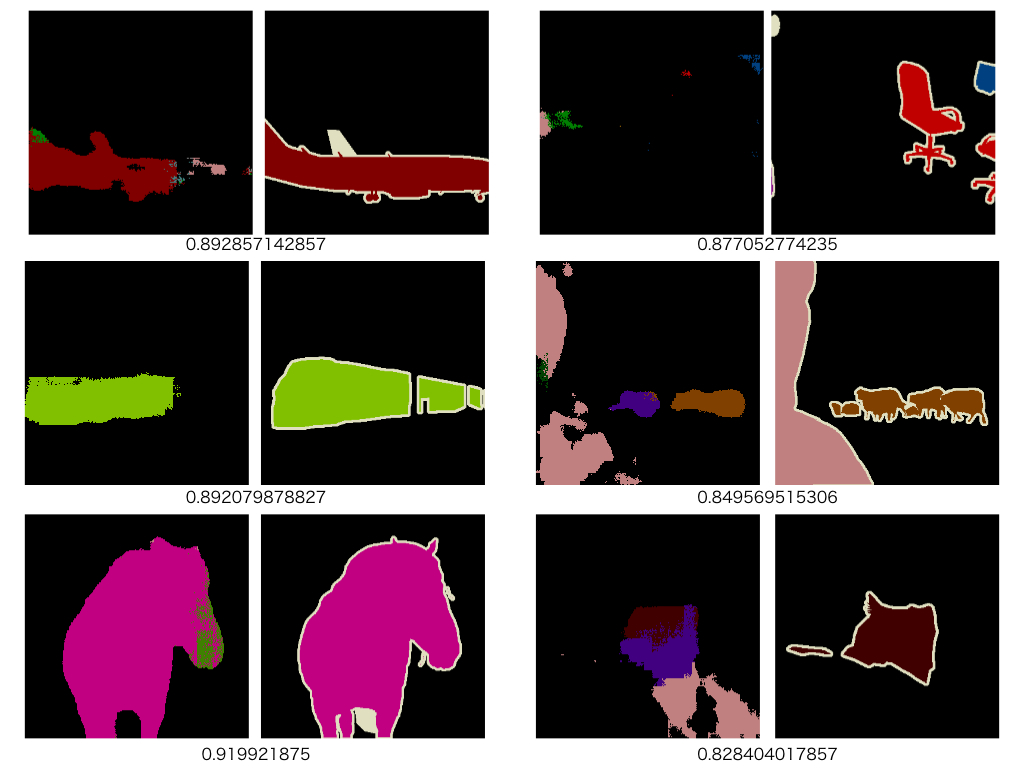
Other samples of predicted and groundtruth images are given below:
-- Training Dataset --
-- Testing Dataset --
Because the accuracy benefits from the background pixels, I think that in order to get satisfied results the accuracy has to achieve over 90%.