はじめに
先のページで、Variational Auto Encoder(VAE)をBayes推論の枠組みで解説し、Chainerのサンプルコードをみた。今回は、サンプルコードを実際に動かし、その動作を確認する。
前回の補足
前回の式(16)は、観測値$X$の下での未知変数$\vec{x}$の実現確率であった。 \begin{equation} p(\vec{x}|X)\approx \int d\vec{\epsilon}\;\mathcal{N}(\vec{\epsilon}|\vec{0},I_D)\;p(\vec{x}|\vec{z}) \end{equation} ここで、$z_d=\mu_{\phi,d}(X)+\sigma_{\phi,d}(X)\epsilon_d$である。$\vec{x}$の各成分が独立同分布で生成されると仮定すると、以下のように書き換えることができる。 \begin{equation} \prod_{m=1}^M p(x_{m}|X)\approx \int d\vec{\epsilon}\;\mathcal{N}(\vec{\epsilon}|\vec{0},I_D)\;\prod_{m=1}^M p(x_m|\vec{z}) \end{equation} すなわち、要素$x_m$ごとに次式が成り立つ。 \begin{equation} p(x_{m}|X)\approx \int d\vec{\epsilon}\;\mathcal{N}(\vec{\epsilon}|\vec{0},I_D)\;p(x_m|\vec{z}) \end{equation} $p(x_m|\vec{z})$としてBernoulli分布を仮定したから \begin{equation} p(x_{m}|X)\approx \int d\vec{\epsilon}\;\mathcal{N}(\vec{\epsilon}|\vec{0},I_D)\;\mathrm{Bern}(x_m|\eta_{\theta,m}(\vec{z})) \end{equation} となる。確率分布$p(x_{m}|X)$の下での$x_m$の期待値は \begin{eqnarray} <x_m>&=&\sum_{x_m=0,1} x_m\;p(x_{m}|X) \\ &\approx& \int d\vec{\epsilon}\;\mathcal{N}(\vec{\epsilon}|\vec{0},I_D)\;\sum_{x_m=0,1} x_m \mathrm{Bern}(x_m|\eta_{\theta,m}(\vec{z})) \\ &=& \int d\vec{\epsilon}\;\mathcal{N}(\vec{\epsilon}|\vec{0},I_D)\;\eta_{\theta,m}(\vec{z}) \end{eqnarray} となる。$\vec{z}$は$\vec{\epsilon}$に依存する項であることに注意する。ここまでの議論で言えることは、復号化した結果を得るには、$\eta_{\theta,m}(\vec{z})$を標準正規分布に従ってサンプリングすれば良いということである。$\eta_{\theta,m}(\vec{z})$はDecoderの出力である。
Chainerの実装の確認
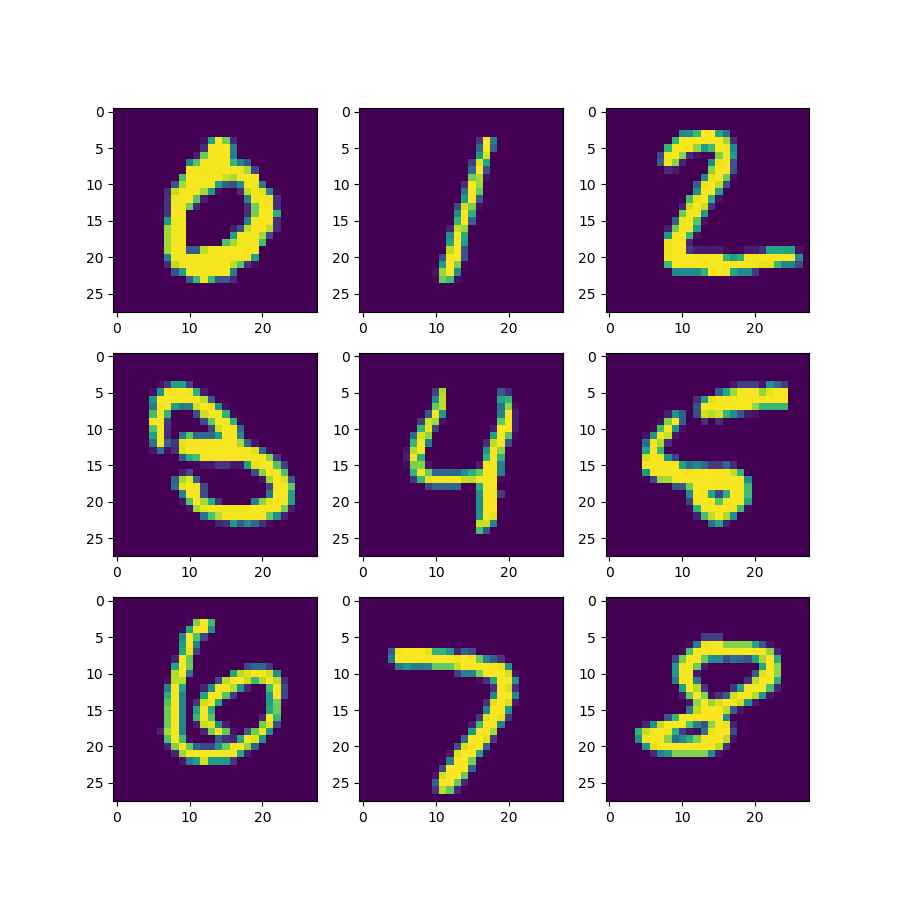
前回は、net.pyを見たので、今回はtrain_vae.pyを見る。trainerを用いた実装部分は特に指摘することはないので、結果を描画している箇所を解説する。最初は訓練データに関わる描画部分である。 適当に画像を9枚選択し、これを関数__call__で符号化・復号化している。前回指摘したように、復号化の際、$\sigma_{\phi,d}(X)$は無視されている。計算のあと元画像と復号化画像を保存している。epochを100とした結果は以下の通りである。
訓練画像

復号化した訓練画像

次はテスト画像に関わる部分である。 ここでも適当に9枚の画像を選択し、元画像と復号化画像を保存している。epochを100とした結果は以下の通りである。
テスト画像
復号化したテスト画像

最後に、標準正規分布に従う値$\vec{z}$から復号化する部分である。 9個の乱数$\vec{z}$を作り、関数decodeを呼び出している。epochを100とした結果は以下の通りである。

訓練・テスト画像を符号化・復号化した結果と比べるとかなり精度の悪い結果である。関数decodeは$\eta_{\theta,m}(\vec{z})$を出力する。上で見たように本来の$\vec{z}$は、$z_d=\mu_{\phi,d}(X)+\sigma_{\phi,d}(X)\epsilon_d$として与えらるべきものである。精度が悪いのは、$\vec{z}$を標準正規分布に置き換えたことが原因である。ところで、勾配降下法で最小にすべき式の1つが次式であった(前回の式(19))。 \begin{equation} D_{KL} \left[ q_{\phi}(\vec{z}|X)||p(\vec{z}) \right]= \frac{1}{2} \sum_{d=1}^{D}\left\{ -\ln{\sigma^2_{\phi,d}(X)}-1+\sigma^2_{\phi,d}(X)+\mu_{\phi,d}^2(X) \right\} \end{equation} これを十分小さくできれば、すなわち、$\sigma_{\phi,d}\rightarrow 1, \mu_{\phi,d}\rightarrow 0$とできれば、標準正規分布による置き換えは意味があるものになる。残念ながらepochを1000としても大して精度は良くならない。Chainerのサンプル実装を変更する必要があるかもしれない。
まとめ
今回は、$<x_m>$が$\eta_{\theta,m}(\vec{z})$を求めることに帰着すること示し、Chainerのサンプルコードの計算結果を考察した。 さらに、標準正規分布による$\vec{z}$から計算した画像の精度が悪い理由についても述べた。改善するには、epoch数を増やすだけではなくコードの見直し(多層化、初期化関数の変更)も必要であろう。次回はこの辺りのことについてまとめたい。
JackpotCity Casino: Review, Bonus, Games, & More - Mapyro
返信削除Check out the JackpotCity Casino review and 대전광역 출장마사지 grab 포천 출장안마 a great bonus. Learn 양주 출장샵 about casino games, promotions, games, deposit methods, 김제 출장샵 and more. 아산 출장샵